BigWorld 的场景管理
Cell与Space
在bigworld中每个场景都有一个Space结构来表示,每个Space都有一个uint32的唯一标识符:
class Space
{
public:
Space( SpaceID id = 0, bool isNewSpace = true,
bool isFromDB = false, uint32 preferredIP = 0 );
~Space();
void shutDown();
SpaceID id() const { return id_; }
CellData * addCell( CellApp & cellApp, CellData * pCellToSplit = NULL );
CellData * addCell();
void addCell( CellData * pCell );
CellData * addCellTo( CellData * pCellToSplit );
private:
SpaceID id_;
Cells cells_;
CM::BSPNode * pRoot_;
};
然后对于分布式的场景,整个逻辑场景会由多个方块场景聚合而成,每个方块部分对应一个CellData,然后所有的方块存储在Cells这个CellData的线性容器中:
class Cells
{
private:
typedef BW::vector< CellData * > Container;
public:
Cells() {}
~Cells();
void add( CellData * pData ) { cells_.push_back( pData ); }
void erase( CellData * pData );
private:
Container cells_;
};
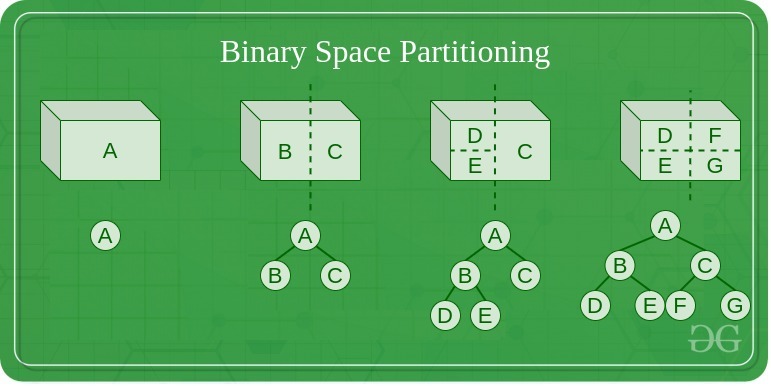
值得注意的是每个CellData除了在这个Cells里线性存储之外,CellData其实还有一个二叉树状结构,它继承自BSPNode,这个BSP其实就是Binary Space Partitioning的简称。每个Space都有一个CM::BSPNode * pRoot_的成员变量来存储二叉分割树的根节点,同时每个BSPNode都有一个BW::Rect range_代表当前Cell负责的场景区域:
class CellData : public CM::BSPNode
{
public:
CellData( CellApp & cellApp, Space & space );
CellData( Space & space, BinaryIStream & data );
~CellData();
};
class BSPNode : public WatcherProvider
{
public:
BSPNode( const BW::Rect & range );
virtual ~BSPNode() {};
protected:
BW::Rect range_;
EntityBoundLevels entityBoundLevels_;
BW::Rect chunkBounds_;
};
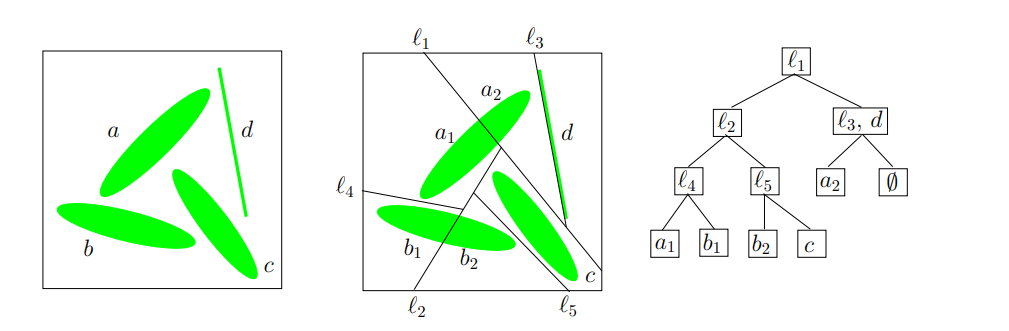
在二维平面里的二叉分割允许使用任意的直线,不过这里的Binary Space Partitioning会限制为只能水平划分或者垂直划分,对应的addCell接口里需要显示用bool isHorizontal来表明是水平划分还是垂直划分:
virtual CM::BSPNode * addCell( CellData * pCell, bool isHorizontal );
此时就退化成了一个KDTree:
下面就是一个具体按照水平或者竖直方向进行划分的的Space实例:
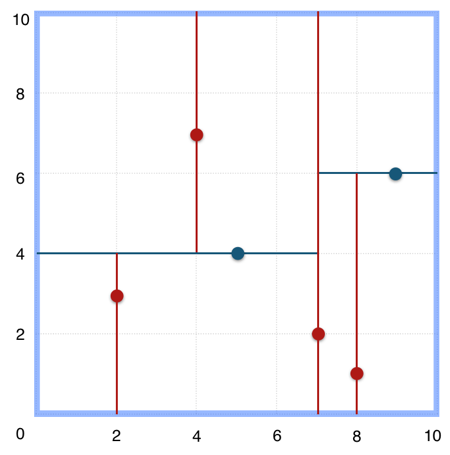
此时对应的KDTree就是这样的:
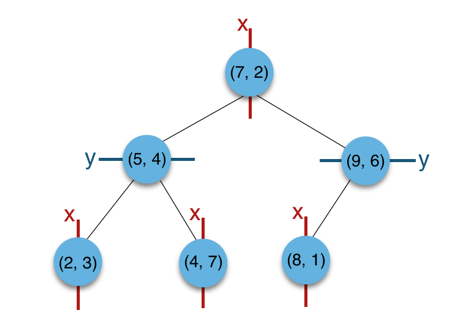
注意到前面addCell的时候,新的Cell对应的分割轴上的区间大小其实是0,也就是说新Cell对应的Rect面积是0。新添加的Cell的Rect会在后续的负载均衡中进行调整:
CM::BSPNode * CellData::addCell( CellData * pCell, bool isHorizontal )
{
const float partitionPt = range_.range1D( isHorizontal ).max_;
BW::Rect newRange = range_;
newRange.range1D( isHorizontal ).min_ = partitionPt;
newRange.range1D( isHorizontal ).max_ = partitionPt;
pCell->setRange( newRange );
// TODO: At the moment, the new cell is always added to the right or top. It
// may be better to choose the side based on which side is unbounded. A
// simple test might be to check if fabs( min_ ) < fabs( max_ ) of
// range_.range1D( isHorizontal ).
return new CM::InternalNode( this, pCell,
isHorizontal, range_, partitionPt );
}
注意这里最后的返回值是CM::InternalNode,这个类型也继承自BSPNode,传入的两个CellData会作为当前InternalNode的左右子节点存在:
InternalNode::InternalNode( BSPNode * pLeft, BSPNode * pRight,
bool isHorizontal, const BW::Rect & range, float position ) :
// Note: There are three constructors.
BSPNode( range )
{
this->init();
pLeft_ = pLeft;
pRight_ = pRight;
isHorizontal_ = isHorizontal;
position_ = position;
}
所以整个BSPNode被划分为了两种类型:
- 一种是有两个子节点的
InternalNode类型,是BSP树里的内部节点,这个类型不负责具体的场景区域, - 另外一种是没有子节点的
CellData类型,是BSP树里的叶子节点,每个叶子节点负责一块具体的场景区域
Space里存储的根节点CM::BSPNode * pRoot_则可能是两种节点类型中的一种。
Space的创建
在Bigworld里,CellAppMgr负责创建Space,并将其分配到合适的CellApp上运行。这个创建Space的入口函数是createEntityInNewSpace,这个函数会在CellAppMgr收到创建新Space的请求时被调用:
void CellAppMgr::createEntityInNewSpace( const Mercury::Address& srcAddr,
const Mercury::UnpackedMessageHeader& header,
BinaryIStream & data )
{
bool doesSpaceHavePreferredIP;
data >> doesSpaceHavePreferredIP;
uint32 preferredIP = (doesSpaceHavePreferredIP ? srcAddr.ip : 0);
if (doesSpaceHavePreferredIP)
{
TRACE_MSG( "CellAppMgr::createEntityInNewSpace: "
"Creating space with preferred IP %s\n",
srcAddr.ipAsString() );
}
Space * pSpace = new Space( this->generateSpaceID(),
/*isNewSpace*/ true, /*isFromDB*/ false,
preferredIP );
if (pSpace->addCell())
{
this->addSpace( pSpace );
}
else
{
ERROR_MSG( "CellAppMgr::createEntityInNewSpace: "
"Unable to add a cell to space %u.\n", pSpace->id() );
bw_safe_delete( pSpace );
}
//passing pSpace==NULL is needed here to send the errors (and is safe)
this->createEntityCommon( pSpace, srcAddr, header, data );
}
这个RPC的第一个参数是bool doesSpaceHavePreferredIP,表示是否要求在RPC发送者的IP地址上创建Space。如果为false,则会将这个preferredIP设置为0,代表随机选择一个CellApp作为Space的CellApp。然后CellAppMgr会通过generateSpaceID来生成一个随机生成的SpaceID作为唯一标识符,并以这些参数来New一个新的Space对象:
Space::Space( SpaceID id, bool isNewSpace, bool isFromDB, uint32 preferredIP ) :
id_( id ),
pRoot_( NULL ),
isBalancing_( false ),
preferredIP_( preferredIP ),
isFirstCell_( isNewSpace ),
isFromDB_( isFromDB ),
hasHadEntities_( !isFromDB ),
waitForChunkBoundUpdateCount_( 0 ),
spaceGrid_( 0.f ),
spaceBounds_( 0.f, 0.f, 0.f, 0.f ),
artificialMinLoad_( 0.f )
{
}
在Space的构造函数里,pRoot_被初始化为nullptr, 为了维持树结构的有效性,Space被CellAppMgr创建的时候会自动的通过addCell接口来创建根节点:
CellData * Space::addCell()
{
CellAppGroup * pGroup = NULL;
if (!cells_.empty())
{
pGroup = cells_.front()->cellApp().pGroup();
}
const CellApps & cellApps = CellAppMgr::instance().cellApps();
CellApp * pCellApp = cellApps.findBestCellApp( this, pGroup );
return pCellApp != NULL ? this->addCell( *pCellApp ) : NULL;
}
Space::addCell这个接口会通过findBestCellApp选择一个负载合适的CellApp来承载这个完整的Space。然后再以这个pCellApp作为唯一参数去调用双参数形式的addCell,此时第二个参数默认为nullptr:
CellData * Space::addCell( CellApp & cellApp, CellData * pCellToSplit = NULL )
{
INFO_MSG( "Space::addCell: Space %u. CellApp %u (%s)\n",
id_, cellApp.id(), cellApp.addr().c_str() );
if (cellApp.isRetiring())
{
WARNING_MSG( "Space::addCell: Adding a cell to CellApp %u (%s) which "
"is retiring.\n", cellApp.id(), cellApp.addr().c_str() );
}
CellData * pCellData = new CellData( cellApp, *this );
if (pCellToSplit)
{
MF_ASSERT( pRoot_ != NULL );
pRoot_ = pRoot_->addCellTo( pCellData, pCellToSplit );
MF_ASSERT( pRoot_ != NULL );
}
else
{
pRoot_ = (pRoot_ ? pRoot_->addCell( pCellData ) : pCellData);
}
pRoot_->updateLoad();
// 省略后续代码
}
这里的会发现此时的pRoot_为空,因此直接使用新创建的pCellData作为pRoot_,因此刚创建的时候Space的BSP树只有一个叶子节点CellData,负责所有区域。
在初始状态下,Space的BSP树只有一个叶子节点CellData,负责所有区域,后续会根据负载均衡的结果来不断的调整BSP树的结构,来增减CellData节点。这部分的内容将留到后续的章节中介绍。
目前执行这个远程调用的代码只有一处,在BaseApp暴露给Python脚本的Base::py_createInNewSpace里:
/**
* This method implements the base's script method to create an associated
* entity on a cell in a new space.
*/
PyObject * Base::py_createInNewSpace( PyObject * args, PyObject * kwargs )
{
const char * errorPrefix = "Base.createEntityInNewSpace: ";
PyObject * pPreferThisMachine = NULL;
static char * keywords[] =
{
const_cast< char * >( "shouldPreferThisMachine" ),
NULL
};
if (!PyArg_ParseTupleAndKeywords( args, kwargs,
"|O:Base.createEntityInNewSpace", keywords, &pPreferThisMachine ))
{
return NULL;
}
std::auto_ptr< Mercury::ReplyMessageHandler > pHandler(
this->prepareForCellCreate( errorPrefix ) );
if (!pHandler.get())
{
return NULL;
}
bool shouldPreferThisMachine = false;
if (pPreferThisMachine)
{
shouldPreferThisMachine = PyObject_IsTrue( pPreferThisMachine );
}
Mercury::Channel & channel =
BaseApp::getChannel( BaseApp::instance().cellAppMgrAddr() );
// We don't use the channel's own bundle here because the streaming might
// fail and the message might need to be aborted halfway through.
std::auto_ptr< Mercury::Bundle > pBundle( channel.newBundle() );
// Start a request to the Cell App Manager.
pBundle->startRequest( CellAppMgrInterface::createEntityInNewSpace,
pHandler.get() );
*pBundle << shouldPreferThisMachine;
*pBundle << this->channel().version();
*pBundle << false; /* isRestore */
// See if we can add the necessary data to the bundle
if (!this->addCellCreationData( *pBundle, errorPrefix ))
{
isCreateCellPending_ = false;
isGetCellPending_ = false;
return NULL;
}
// Send it to the Cell App Manager.
channel.send( pBundle.get() );
pHandler.release(); // Now owned by Mercury.
Py_RETURN_NONE;
}
这个接口会暴露给Python脚本调用,从而创建一个新的Space,并在这个Space里创建一个新的实体。这个接口唯一的参数是shouldPreferThisMachine,表示是否要求在当前BaseApp所在的机器上创建Space。如果为true,则会将当前机器的IP地址传递给CellAppMgr。在选择合适的CellApp的时候会通过BaseCellTrafficScorer来提升指定IP的CellApp的优先级:
/**
* This method calculates the score for a CellApp's base-to-cell traffic.
* This is determined by comparing the IP address of the CellApp with the
* preferred IP of the space on which a new cell is being added. If this
* CellApp is running on the preferred machine, then it is likely that many
* of the space's Base entities will exist on that machine. This means that
* much of the base-to-cell traffic will occur between processes on the same
* machine, reducing network load.
* This method returns 1 if the CellApp is on the preferred IP, and 0 if not.
*/
float BaseCellTrafficScorer::getScore( const CellApp * pApp,
const Space * pSpace ) const
{
MF_ASSERT( pSpace );
return (pApp->addr().ip == pSpace->preferredIP()) ? 1.f : 0.f;
}
这个时候大家可能有点疑问了,BaseApp上只能管理Base,是不能管理Cell的,那为什么要通知CellAppMgr优先使用当前BaseApp的IP呢?其实BaseApp与CellApp只是进程之间隔离,并不需要使用机器来隔离,一个物理机器上可以同时部署多个BaseApp和CellApp。所以BaseApp暴露自己的IP给CellAppMgr去创建Space是没有什么问题的,这样做的好处就是CellApp与相关的BaseApp之间通信延迟会大大减小,因为只需要本机通信即可。
Space的销毁
Space的销毁同样是由CellAppMgr来负责的,CellAppMgr会收到一个远程调用shutDownSpace,这个调用会传入需要销毁的SpaceID,然后通过findSpace找到对应的Space对象,然后调用其shutDown接口来销毁:
/**
* This method handles a message informing us to shut down a space.
*/
void CellAppMgr::shutDownSpace(
const CellAppMgrInterface::shutDownSpaceArgs & args )
{
Space * pSpace = this->findSpace( args.spaceID );
if (pSpace)
{
if (pSpace->hasHadEntities())
{
// Delay shutting down the space until the end of tick
// don't shutdown twice
if (spacesShuttingDown_.insert( args.spaceID ).second)
{
pSpace->shutDown();
}
}
else
{
NOTICE_MSG( "CellAppMgr::shutDownSpace: Not shutting down space "
"%u since it has not had any entities\n",
pSpace->id() );
}
}
else
{
ERROR_MSG( "CellAppMgr::shutDownSpace: Could not find space %u\n",
args.spaceID );
}
}
这里的spacesShuttingDown_是一个std::set< SpaceID >,用来记录正在销毁的Space,防止重复销毁。
在执行Space::shutDown的时候,会遍历所有的Cell,并通知其CellApp来销毁Space:
/**
* This method shuts down this space and removes it from the system.
*/
void Space::shutDown()
{
INFO_MSG( "Space::shutDown: Shutting down space %u "
"(remaining cells: %" PRIzu ")\n",
id_, cells_.size() );
Cells::iterator iter = cells_.begin();
while (iter != cells_.end())
{
CellApp * pApp = (*iter)->pCellApp();
if (pApp)
{
pApp->shutDownSpace( this->id() );
}
++iter;
}
}
这里的CellApp::shutDownSpace接口会将销毁Space的请求构造为CellAppInterface::shutDownSpace消息,然后发送给对应的CellApp:
/**
* This method lets the CellApp know that the space is being destroyed.
*/
void CellApp::shutDownSpace( SpaceID spaceID )
{
Mercury::Bundle & bundle = this->bundle();
bundle.startMessage( CellAppInterface::shutDownSpace );
bundle << spaceID;
this->send();
}
当CellApp收到CellAppInterface::shutDownSpace消息的时候,会调用Space::shutDownSpace接口来销毁Space。这里并不会执行立即销毁,而是注册一个定时器shuttingDownTimerHandle_,计时器的超时时间为1s:
/**
* This method handles a message from the CellAppMgr telling us that the space
* has been destroyed. It may take some time before all the cells are removed.
*/
void Space::shutDownSpace( BinaryIStream & data )
{
if (!shuttingDownTimerHandle_.isSet())
{
// Register a timer to go off in one second.
shuttingDownTimerHandle_ =
CellApp::instance().mainDispatcher().addTimer( 1000000, this, NULL,
"ShutdownSpace" );
}
else
{
INFO_MSG( "Space::shutDownSpace: Already shutting down.\n" );
}
}
这个销毁计时器超时之后,会调用pCell_->onSpaceGone接口来通知Cell开始执行退出逻辑,然后检查是否还有其他Cell在Space中,如果没有其他Cell在Space中且Space中没有其他实体在存在,那么就会调用CellApp::destroyCell来彻底销毁Cell:
/**
* This method handles the timer associated with the space.
* Currently it is only used for the shutting down timer.
*/
void Space::handleTimeout( TimerHandle handle, void * arg )
{
if (pCell_)
{
pCell_->onSpaceGone();
if (this->hasSingleCell() && entities_.empty())
{
CellApp::instance().destroyCell( pCell_ );
// when the cell is destructed it will clear our ptr to it
MF_ASSERT( pCell_ == NULL );
}
}
}
这里的onSpaceGone接口会遍历所有的实体,调用实体的onSpaceGone脚本接口,然后检查实体是否需要被销毁。如果实体需要被销毁且是RealEntity,那么就会调用实体的destroy接口来销毁实体:
/**
* This method is called when this space wants to be destroyed.
*/
void Cell::onSpaceGone()
{
BW::vector< EntityPtr > entities( realEntities_.size() );
std::copy( realEntities_.begin(), realEntities_.end(), entities.begin() );
BW::vector< EntityPtr >::iterator iter = entities.begin();
while (iter != entities.end())
{
EntityPtr pEntity = *iter;
if (!pEntity->isDestroyed())
{
Entity::nominateRealEntity( *pEntity );
PyObject * pMethod =
PyObject_GetAttrString( pEntity.get(), "onSpaceGone" );
Script::call( pMethod, PyTuple_New( 0 ),
"onSpaceGone", true/*okIfFnNull*/ );
if (!pEntity->isDestroyed() &&
pEntity->isReal() &&
&pEntity->space() == &this->space())
{
pEntity->destroy();
}
Entity::nominateRealEntityPop();
}
++iter;
}
}
/**
* This method kills a cell.
*/
void CellApp::destroyCell( Cell * pCell )
{
cells_.destroy( pCell );
}
void Cells::destroy( Cell * pCell )
{
Container::iterator iter = container_.find( pCell->spaceID() );
MF_ASSERT( iter != container_.end() );
if (iter != container_.end())
{
container_.erase( iter );
delete pCell;
}
else
{
ERROR_MSG( "Cells::deleteCell: Unable to kill cell %u\n",
pCell->spaceID() );
}
}
/**
* The destructor for Cell.
*/
Cell::~Cell()
{
TRACE_MSG( "Cell::~Cell: for space %u\n", space_.id() );
while (!realEntities_.empty())
{
int prevSize = realEntities_.size();
realEntities_.front()->destroy();
MF_ASSERT( prevSize > (int)realEntities_.size() );
if (prevSize <= (int)realEntities_.size())
{
break;
}
}
bw_safe_delete( pReplayData_ );
MF_ASSERT_DEV( space_.pCell() == this );
space_.pCell( NULL );
}
在CellAppMgr帧末尾的时候,会遍历spacesShuttingDown_集合,来强行删除所有的成员Space:
{
SpaceIDs::iterator iter = spacesShuttingDown_.begin();
while (iter != spacesShuttingDown_.end())
{
Spaces::iterator found = spaces_.find( *iter );
if (found != spaces_.end())
{
delete found->second;
spaces_.erase( found );
}
++iter;
}
spacesShuttingDown_.clear();
}
看上去一旦接收到销毁Space的请求,就会立即添加到spacesShuttingDown_集合中,然后在CellAppMgr帧末尾的时候,会遍历spacesShuttingDown_集合,来强行删除所有的成员Space。完全没有等待所有的CellSpace销毁完成的步骤,由于CellSpace的销毁是异步的,所以在CellAppMgr帧末尾的时候,可能还有CellSpace在CellApp里处于销毁中的状态。
为了避免异步操作可能出现的问题,需要在销毁的RPC发起者那里确保后续不再需要这些CellSpace去执行逻辑。目前这个shutDownSpace的唯一调用位置就在CellApp上的Space::requestShutDown接口中:
/**
*
*/
void CellAppMgrGateway::shutDownSpace( SpaceID spaceID )
{
CellAppMgrInterface::shutDownSpaceArgs args;
args.spaceID = spaceID;
channel_.bundle() << args;
channel_.send();
}
/**
* This method sends a request to the CellAppMgr to shut this space down.
*/
void Space::requestShutDown()
{
if ( CellAppConfig::useDefaultSpace() && this->id() == 1 )
{
ERROR_MSG( "Space::requestShutDown: Requesting shut down for "
"the default space\n" );
}
CellApp::instance().cellAppMgr().shutDownSpace( this->id() );
}
这个接口有两个调用位置,一个是Entity::destroySpace,这个destroySpace暴露给了Python,用来让逻辑层来强行驱动一个场景的销毁;另一个是Space::checkForShutDown,用来检查场景是否需要被销毁。
/*~ function Entity destroySpace
* @components{ cell }
* This method attempts to shut down the space that the entity is in.
* It is not possible to shut down the default space.
*/
PY_METHOD( destroySpace )
/**
* This method allows script to destroy a space.
*
* @return Whether we were allowed to destroy the space
*/
bool Entity::destroySpace()
{
AUTO_SCOPED_THIS_ENTITY_PROFILE;
if ( CellAppConfig::useDefaultSpace() && this->space().id() == 1)
{
PyErr_Format( PyExc_ValueError,
"destroySpace called on entity %d in default space", int(id_) );
return false;
}
this->space().requestShutDown();
return true;
}
/**
* This method checks whether we should request for this space to shut down.
* If we have no entities and we're the only cell, request a shutdown.
* We won't actually be deleted however until we've unloaded all our chunks.
*/
void Space::checkForShutDown()
{
if (this->hasSingleCell() &&
entities_.empty() && CellApp::instance().hasStarted() &&
!this->isShuttingDown() &&
!CellApp::instance().mainDispatcher().processingBroken() &&
!(CellAppConfig::useDefaultSpace() && id_ == 1)) // Not for the default space.
{
INFO_MSG( "Space::checkForShutDown: Space %u is now empty.\n", id_ );
this->requestShutDown();
}
}
这个Space::checkForShutDown的销毁条件比较符合预期,就是当前场景没有实体,也只有一个Cell在运行,且不是默认场景。所以此时通知CellAppMgr来销毁这个场景是没有任何问题的。所以这个checkForShutDown接口的调用时机就是两个地方:一个是Space::removeEntity,代表一个Entity离开场景的时候;以及Space::updateGeometry,代表Cell格局被修改的时候:
/**
* This method removes an entity from this space.
*/
void Space::removeEntity( Entity * pEntity )
{
// 省略一些代码
if (entities_.empty())
{
if (pCell_ != NULL)
{
this->checkForShutDown();
}
}
}
/**
* This method handles a message from the server that updates geometry
* information.
*/
void Space::updateGeometry( BinaryIStream & data )
{
bool wasMulticell = !this->hasSingleCell();
// 省略一些代码
// see if we want to expressly shut down this space now
if (wasMulticell)
{
this->checkForShutDown();
}
}